
Abbildung 1: Simprop Solution XL Projekt Zwo vor dem Jungfernflug mit voll ausgefahrenen Störklappen, sowie Querrudern und Wölbklappen in Butterfly-Position.
Version: βeta (1713958352) | UNDER CONSTRUCTION
Drucken | Google Translate|EN
Ende 2008. Nach meinem Wiedereinstieg in den Modellsegelflug mit den genialen Multiplex «Elapor-Bombern» EasyGlider Electric und Cularis musste etwas Grösseres und Anspruchsvolleres her. Angetan von der Qualität der Elektrosegler aus dem Hause Simprop prüfte ich den Excel 4004; die Optik des V-Leitwerks und fehlende Störklappen hielten mich vorerst vom Kauf ab. Zum Glück, denn nur wenige Monate später wurde ich auf die innovative Neuentwicklung Solution XL Projekt Zwo, die Nachfolgerin der Solution XL aufmerksam (letztere hatte ich ebenfalls ins Auge gefasst, dann aber wegen ihres Alters – wie auch die Prolution 4004 – verworfen). Hatte ich den perfekten Allround-Segler gefunden?
Abbildung 1: Simprop Solution XL Projekt Zwo vor dem Jungfernflug mit voll ausgefahrenen Störklappen, sowie Querrudern und Wölbklappen in Butterfly-Position.
Da zuverlässige Informationen zur Solution XL Projekt Zwo nicht nur auf der offiziellen – absolut unwürdigen – Simprop-Website, sondern auch in Internet-Foren dünn gesät waren, bestellte ich als erstes sämtliche Magazine mit Test-Berichten nach, um mir ein Bild machen zu können. Folgende Quellen haben sich im Nachhinein als besonders hilfreich erwiesen:
Ziemlich schnell zeichnete sich ab, dass die Elektro-ARF-Version trotz der gewöhnungsbedürftigen weiss / perlmutt-blauen Bespannung die richtige Wahl für mich ist, denn einerseits wollte ich aus technischen (eine Funktion mehr für das «Kind im Manne») und lokalen Gründen (Bremswirkung in den Schweizer Alpen) nicht auf Störklappen verzichten, andererseits hatte ich als «wilder» Pilot sowieso keine Möglichkeit zum F-Schlepp, was einen eigenen Antrieb unabdingbar machte. So bestellte ich mir die Solution XL Projekt Zwo! Nach einer (gefühlt) unendlich langen Lieferfrist von sechs Wochen traf sie – genau einen Tag nach meinem Dreissigsten – zusammen mit einem Teil des sorgfältig ausgewählten Zubehörs (vgl. Kapitel 2) ein. Der Bau (vgl. Kapitel 3) begann am folgenden Tag und dauerte – in «gemütlichem» Tempo – etwas mehr als zwei Monate. Pünktlich zum Frühlingsanfang war die Zeit reif für den Jungfernflug (vgl. Kapitel 4).
Doch beginnen wir von vorne...
Die Simprop|DE Solution XL Projekt Zwo wurde im Frühjahr 2008 auf der Spielwarenmesse Nürnberg|DE präsentiert. Dabei sorgte vor allem das «futuristische Leitwerk, bei dem Hai und Wal gleichermassen Pate gestanden haben» für Aufsehen. Was viele, wie in diesem Fall Philipp Korntheurer, als seltsam oder gar lächerlich verspotten, empfinde ich auch heute noch als technisch geniale Lösung, die mir zudem optisch sehr gut gefällt.


Abbildung 2 / 3: Bullenhai (links) und Orca (rechts) sollen angeblich beim futuristischen T-Leitwerk der Solution XL Projekt Zwo Pate gestanden haben.
Quellen: Brian J. Skerry []; Gerard Lacz [Januar 2011]


Abbildung 4 / 5: Detailansicht des T-Leitwerks (links) mit Design-Hutze; Simprop-Konstrukteur Bernd Schwermann an der Spielwarenmesse Nürnberg 2008 (rechts).
Photos: Udo Fiebig
Das exzellente Einsteigermodell in die 4m-Klasse (genau genommen beträgt die Spannweite sogar 4mm mehr) hat eine Länge von 1769mm und bringt in der von mir gewählten Version über 5kg auf die Waage. Für die Styro-Abachi-Flächen in bewährter Simprop-Fertigbauweise mit Elastic-Flaps, minimalen Ruderspalten, dreifacher V-Form, Tiefensprung und Flächenohren wurde das thermikorientierte Flügelprofil HQ/W-2.3 / 12.0% > 10.5% > 9.0% von Dr. Helmut Quabeck verwendet. Es lässt sich durch den Einsatz der Wölbklappen noch deutlich in Richtung «soft» oder «hot» verschieben. Die Tragflächen, der Rumpf (nur bis zum Seitenleitwerk) und das Höhenleitwerk sind von der «Prolution 4004» abgeleitet.
| Herstellerangaben | eigenes Modell | |
|---|---|---|
| Spannweite | 4004mm | 4008mm |
| Länge | 1769mm | 1779mm |
| Flügelprofil | HQ/W-2.3 / 12.0% > 10.5% > 9.0% | |
| Flügelstreckung | 18.90 | |
| Leitwerksprofil | HQ/W-0 / 7.7% > 9.0% | |
| Tragflächeninhalt | 84.7dm² | |
| Höhenleitwerksinhalt | 8.7dm² | |
| Fluggewicht | ab 5100g | 5293g |
| Gesamtflächenbelastung | ab 54.6g/dm² | 56.7g/dm² |
| Einstellwinkeldifferenz (EWD) | +1.75° | +1.78° (links) |
| Schwerpunkt | 86mm – 96mm | 95mm |
| V-Form | 1.5° / 3.5° (je Seite); ca. 2.5° (mittlere V-Form) | |
| RC-Funktionen | Höhe, Seite; Querruder, Wölb- (Butterfly) und Störklappen; Motorregler | |
| Preis | €UR 693.— | CHF 979.— |
Tabelle 1: Technische Daten der Simprop Solution XL Projekt Zwo in der Elektro-ARF-Version.
Quelle: Simprop [April 2008]
Auch bei der Solution XL Projekt Zwo hat Simprop-Konstrukteur Bernd Schwermann nicht an Verstärkungen gespart: so wurden von der Spitze bis zum Ende der Tragflächenanformung etwa 5cm breite CFK-Bänder in den GFK-Rumpf eingearbeitet und die Styro-Abachi-Flächen ihrerseits mit GFK verstärkt. Generell ist der Vorfertigungsgrad sehr hoch; sämtliches Befestigungsmaterial und Anlenkungszubehör (inkl. Servoeinbaurahmen) ist enthalten. Dies und viele weitere typische Lösungen à la Harsewinkel führen zu einem sehr guten Preis-Leistungs-Verhältnis.
Auf den Bausatz werde ich in Kapitel 3 noch genauer eingehen, zuerst jedoch ein paar Worte zum verwendeten Zubehör...
Wer ein über 5kg schweres Modellflugzeug sicher betreiben will, muss sich auf sämtliche Teile voll und ganz verlassen können! Es verwundert also nicht, dass das von mir sorgfältig ausgewählte, qualitativ hochwertige Zubehör rund zur Hälfte «Made in Germany» und zu einem Viertel «Made in Japan» ist; Südkorea und die USA haben einen Anteil von knapp 10%. Der Rest ist schwer zuzuordnen, stammt aber – so ist anzunehmen – aus Billiglohn-Ländern wie China (nicht genauer bestimmen lässt sich, wie viel Firmen wie Simprop|DE, Kontronik|DE, Futaba|EN und Co. im Ausland produzieren lassen).
| Empfänger | ca. CHF 250.— |
|---|---|
| Servos | ca. CHF 600.— |
| Regler | ca. CHF 350.— |
| Motor, Spinner und Propeller | ca. CHF 400.— |
| Akku | ca. CHF 250.— |
| Logger (ohne Variometer) | ca. CHF 200.— |
Tabelle 2: Ungefähre Kosten des verwendeten Zubehörs.
Einziger Nachteil des «edlen» Zubehörs: im Schweizer Fachhandel musste ich für die komplett ausgestattete Solution XL Projekt Zwo in der Elektro-ARF-Version ziemlich genau CHF 3000.— auf den Tisch legen, das sind ca. €UR 2000.— (vgl. Tabelle 2). Ich denke, dass die Elektro-ARC-Version mit Aussenläufer-Motor und billigstem Zubehör für knapp über CHF 2000.— möglich wäre. Gut schlafen könnte ich damit aber nicht!
Update [Mai 2010]: Bei den Kosten kommen noch rund CHF 50.— für den selbst entworfenen Folien-Dekorsatz hinzu.
Vorbemerkung: Für Piloten, die keinem Verein angehören und somit öfters abseits von Modellflugplätzen fliegen, kommt IMHO (meiner bescheidenen Meinung nach) nur ein Übertragungsverfahren im 2.4GHz-Frequenzband in Frage! Da ich mit Futaba|EN bereits in der Vergangenheit gute Erfahrungen gemacht hatte und die Japaner mit ihrer FASST-Technologie als erste ein zuverlässiges System für den Modellflug anbieten konnten, kaufte ich mir im August 2008 den 10-Kanal-Sender T10CP.
Ein «Full-House-Glider» mit zusätzlichen Störklappen und Motorregler benötigt neun Kanäle; mindestens ein weiterer Kanal ist für die Steuerung des Variometers sinnvoll. Somit kam – obwohl ich die Störklappen über ein Y-Kabel betreiben muss, weil der Futaba Sender T10CP nur über acht proportionale Kanäle verfügt – nur der Futaba Empfänger R6014FS FASST 2.4GHz (20.8g) in Frage. Da der Rumpf der Solution XL Projekt Zwo mit CFK-Bändern verstärkt ist, die aufgrund ihrer elektrischen Leitbarkeit Signalverfälschungen hervorrufen könnten, habe ich diesen 14-Kanal-Empfänger nachträglich mit 400mm Empfängerantennen ausgestattet; diese kann ich besser aus dem Rumpf führen.
Update [Juli 2009]: Mittlerweile ist mit dem Futaba R6014HS FASST 2.4GHz ein Nachfolger meines Empfängers erhältlich. Er soll weniger anfällig für hohe Temperaturen und besser verträglich mit gewissen Hitec|DE-Servos sein. Zudem wird die Frequenz bei der Ansteuerung von Digitalservos auf sieben Kanälen verdoppelt, was aber vor allem für den Einsatz in Helikoptern relevant ist.
Der Einsatz von Digitalservos hat fast nur Vorteile: höheres Drehmoment, bessere Auflösung, bessere Neutralstellung und höhere Haltekraft. Über den höheren Stromverbrauch muss man sich allerdings im Klaren sein. So können zwei verklemmte Störklappen oder ein gleichzeitiges Betätigen aller Servos ein schwaches BEC bereits in die Knie zwingen (vgl. Kapitel 2.3). Zum Glück gibt die Datenbank Servomances|FR – Caractéristiques et Performances des Servos einen Anhaltspunkt der zu erwartenden Maximalströme (vgl. Tabelle 3).
| Futaba S3050 Digital | Futaba S3150 Digital | |
|---|---|---|
| Getriebe | Metall | Metall |
| Drehmoment | 52.0Ncm | 37.0Ncm |
| Stellzeit | 0.15s/45° | 0.19s/45° |
| Stromstärke Imax | 835mA | 615mA |
| Gewicht | 49.0g | 23.0g |
| Abmessungen | 40.0mm x 38.1mm x 20.0mm | 30.0mm x 29.0mm x 10.8mm |
Tabelle 3: Technische Daten der Futaba Servos Standard High-Torque S3050 Digital und Slim S3150 Digital (4.8V).
Quellen: Futaba [April 2009]; Servomances [April 2009]
Für Querruder- und Wölbklappen-Anwendungen hat sich das Futaba|EN Slim Digital Servo S3150 (23g) schon fast zur Norm «gemausert». Trotz seiner Breite von lediglich 10.8mm ist es extrem kräftig und verfügt über gefräste Zahnräder aus Messing; es sollte aber nicht mit einer Spannung von 6V betrieben werden. Da die Solution XL Projekt Zwo zusätzlich über Störklappen verfügt, kommen gleich drei Servos dieses Typs pro Fläche zum Einsatz. Im Rumpf verrichten zwei Standard High-Torque Digital Servos S3050 (49g) ihren Dienst. Das 6g leichtere Standard High-Torque Servo S3152 wäre eine echte Alternative, ist aber etwas langsamer und hat kein Metallgetriebe.
Natürlich gibt es weitere zuverlässige Hersteller von Servos. Doch seit das in Internet-Foren viel gelobte Hitec|DE Servo HS-65MG (mit «robustem» Metallgetriebe) nach nur wenigen Flügen in meiner Multiplex Cularis versagt hat, bleibe ich persönlich lieber bei Futaba. Damit habe ich den zusätzlichen Vorteil, dass Empfänger und Servo absolut kompatibel sind.
Für Elektro-Modellsegelflieger ab sechs bis acht Servos wird grundsätzliche ein Betrieb mit separater Empfängerstromversorgung (LiPo-Akku und separater Empfängerakku) oder – eher übertrieben – mit Doppelstromversorgung (zwei LiPo-Akkus verbunden über eine Akku-Weiche) empfohlen; dies umso mehr, wenn Digitalservos zum Einsatz kommen. Eigene Messungen haben ergeben, dass die Ströme beim Einsatz eines BEC auch bei unrealistischem, kräftigem Rudern mit acht Digitalservos praktisch nie über 2A steigen (selbstverständlich ist beim Bau darauf zu achten, dass die Ruder leichtgängig gehen).
Update [Juli 2009]: In den ersten zehn Flügen mit der Solution XL Projekt Zwo stieg die BEC-Maximalstromstärke gemäss Logger nie über 0.55A. Diese Messungen sind allerdings mit Vorsicht zu geniessen, da die Auflösung der Daten maximal 100ms beträgt.
Folglich kann ein entsprechender Segler mit einem einzigen LiPo-Akku sicher betrieben werden, wenn das BEC des Reglers einen Dauerstrom von 2A und einen Maximalstrom von 5.36A (Summe der Maximalströme; vgl. Kapitel 2.2) aushält; zusätzlich sollte die BEC-Spannung bei ca. 4.8V liegen, da sonst das Futaba|EN Slim Digital Servo S3150 ausserhalb der Empfehlungen betrieben wird. All diese Eigenschaften vereint der edle Kontronik|DE Regler Jive 80+ LV (84g), der zudem über automatische Kommutierungsanpassung und ein schlag- und wasserfestes Gehäuse mit sehr guter Wärmeabfuhr verfügt. Der Drehzahlsteller versorgt den Empfänger über zwei parallele BEC-Kabel mit 5A Dauerstrom und einem Maximalstrom von sagenhaften 15A! Mit Hilfe der ProgCard II lässt sich die BEC-Spannung (getaktet) auf 5V limitieren. Der kurzschlussfeste Regler kann den Motor mit einem Dauerstrom von 80A antreiben; gute Kühlung ermöglicht bis zu doppelter Leistung. Übrigens liessen sich separate Empfängerakkus auch ohne den Einbau von Schottky-Dioden an die meisten Kontronik- und Simprop|DE-Regler anschliessen.
Seien wir realistisch: mit der hier aufgezeigten Methode entfallen nicht nur die Wartung eines zusätzlichen Akkus und bis zu 75g Fluggewicht, sie ist IMHO – die üblichen, regelmässigen Kontrollen aller Komponenten vorausgesetzt – auch sicher! Nur eine komplette Redundanz und damit der Einsatz von zwei Empfängern würde einen entscheidenden Mehrwert bringen. Dies ist meiner Meinung nach erst ab Segelfliegern mit mehr als 5m Spannweite sinnvoll.
Für Interessierte sei auf den ursprünglich in der FMT|DE – Flugmodell und Technik erschienenen Bericht Alles über BEC-Stromversorgungen – Sicherheit im Modellflug durch sichere Empfängerstromversorgung|PDF hingewiesen, in dem Ulf Herder und Matthias Schulze von Schulze Elektronik|DE die Zusammenhänge zwischen BEC und Pufferakku erläutern.

Genial einfach: beim Anstecken der kleinen Kontronik|DE ProgCards (vgl. Abbildung; Photo: Kontronik) an einen passenden Regler werden die bereits eingestellten Parameter ausgelesen und mittels LED angezeigt (dazu wird ein Servo-Kabel, jedoch keine zusätzliche Batterie benötigt). Anschliessend lassen sich mit Hilfe eines Tasters alle erdenklichen Parameter einstellen; nur die Abschalt- resp. Abregel-Spannung ist mit maximal 3.0V etwas tief angelegt. Da es sich hier jedoch um die Spannung unter Last handelt, ist dieser Wert sowieso mit Vorsicht zu geniessen! Zum Schutz meiner LiPo-Akkus habe ich deshalb diesen Maximalwert eingestellt.
ProgCard I (für Jive, Jazz-Familie, Pix und Sun Plus): Bremse, Akkutyp (NiCd / NiMH oder LiPo), Abschalten oder Abregeln inkl. Spannung in ca. 0.2V-Schritten zwischen 2.5V und 3.0V, Anschprechverhalten (weich oder schnell), Timing-Veränderung (automatisch oder in 5°-Schritten zwischen -5° und 10°), Drehzahlregelung inkl. Hochlaufzeit in 2s-Schritten zwischen 6s und 12s, Auto-Programmier-Modus oder feste Knüppelwege inkl. Setzen der einzelnen Knüppelpositionen (Motor aus, Vollgas, Bremse), Zurücksetzen in Originalzustand.
ProgCard II (für Jive): BEC-Ausgangsspannung in 0.2V-Schritten zwischen 5V und 6V, maximale Bremsstärke in 2.5%-Schritten, Drehzahlregelung (Glättung, Integralverstärkung und Proportionalverstärkung), Drehrichtungsumkehr, Hold 3s oder 0.3s, Zurücksetzen in Originalzustand.
Die beiden ProgCards kosten je knapp CHF 30.— (ca. €UR 20.—).
Update [Juli 2009]: Mittlerweile ist mit dem Kontronik Regler Jive 60+ LV (84g) eine baugleiche, aber um etwa CHF 50.— (ca. €UR 35.—) günstigere Alternative erhältlich. Diese würde jedoch mit bis zu 95% des Dauerstromes, anstatt vernünftigen 71.5% belastet.
Vorbemerkung: In Anlehnung an die offizielle Antriebsauslegung von Dr. Wolfgang Schäper habe ich mich für einen 4S-LiPo-Akku (vier Zellen in Serie) entschieden (vgl. Kapitel 2.5).
Für die Antriebsauslegung nehme ich MotoCalc|EN – Electric Flight Performance Prediction Software zur Hilfe. Dieses einfach zu bedienende Programm kostet in der Download-Version zwar stolze US$ 39.— (ca. CHF 45.— / €UR 30.—), lässt sich aber äusserst intuitiv bedienen und beinhaltet hilfreiche Funktionen, wie zum Beispiel den MotoWizard (viele Leute bevorzugen Drive Calculator|DE, ich komme mit dieser Freeware allerdings gar nicht klar).
Aus der Praxis war mir bekannt, dass Innenläufer-Motoren mit Getriebeuntersetzung in Verbindung mit grossen Klappluftschrauben ca. dreimal teurer sind, aber insbesondere beim (Hand-) Start den besseren Wirkungsgrad und damit die höhere Antriebsleistung als Aussenläufer bieten. Mit anderen Worten: exakt das, was ich brauche! Auf Grund dessen konnte ich mich sehr schnell für den Kontronik|DE Innenläufer-Motor Kira 600-24 mit Getriebe 6.7:1 (312g) entscheiden. Dieses Performance-Wunder verfügt über einen internen Lüfter und liefert so bis maximal 950W Dauerleistung. Zur optimalen externen Kühlung setze ich den empfohlenen Simprop|DE Alu-Spinner Turbo Ø 45 / BW 8mm / Ø 6.0 (20.5g) ein.
Vom ebenfalls empfohlenen Simprop Innenläufer-Motor Magic-Drive 50-28 mit Getriebe 6.7:1 (317g) habe ich übrigens abgesehen, weil damit der Wirkungsgrad um rund 3.2% tiefer liegen würde und ich davon ausgehe, dass Regler und Motoren des gleichen Herstellers besser harmonieren.
| Regler | Kontronik Jive 80+ LV | |
|---|---|---|
| Motor | Kontronik Innenläufer Kira 600-24 mit Getriebe 6.7:1 | |
| Spinner | Simprop Alu-Spinner Turbo Ø 45 / BW 8mm / Ø 6.0 | |
| Akku | Enerland LiPo PolyQuest 4500XQ 4S1P (30C) | |
| Propeller | aero-naut CAMcarbon 18.5 x 12" | aero-naut CAMcarbon 18.0 x 11" |
| Stromstärke | 57.2A | 48.7A |
| Leistung Pin | 795.9W | 683.6W |
| Leistung Pout | 718.9W | 621.0W |
| Wirkungsgrad | 90.3% | 90.8% |
| gewichtsbezogene Leistung | 147.5W/kg | 126.7W/kg |
| Drehzahl | 4779rpm | 4859rpm |
| Standschub | 42.06N | 37.94N |
| Strahlgeschwindigkeit | 24.3m/s | 22.6m/s |
| Steiggeschwindigkeit | 6.22m/s | 5.00m/s |
Tabelle 4: Antriebsauslegung mit zwei verschiedenen Klappluftschrauben (425m über Meer; 1013hPa; 25°C).
Quelle: MotoCalc [August 2009]
Nach längeren Analysen mittels MotoCalc kamen für mich zwei Klappluftschrauben in Frage (vgl. Tabelle 4). Um den Handstart ohne Werfer zu erleichtern, habe ich mich schlussendlich für die kräftigere aero-naut|DE CAMcarbon 18.5 x 12“ (32g) entschieden; damit beträgt das Verhältnis von Standschub zu Gewicht 0.78:1. Die gewichtsbezogene Leistung von 147.5W/kg ermöglicht eine (theoretische) Steiggeschwindigkeit von 6.22m/s bei einer Steigrate von 30.6°. Trotzdem bleibt die Stromstärke mit 57.2A im grünen Bereich. Auch gemäss Michael «Mike» Franz von Kontronik passt diese Antriebsauslegung «sehr gut».
In Elektroseglern werden heute typischerweise Lithium-Polymer-Akkus mit mehreren in Serie geschalteten 3.7V-Zellen eingesetzt. Je höher dabei die Zellenzahl (und somit die Spannung), desto niedriger ist die für die gleiche Leistung notwendige Stromstärke. Mit anderen Worten: es gilt, eine sinnvolle Kombination von Spannung und Stromstärke zu finden!
Für den gewählten Kontronik|DE Innenläufer-Motor Kira 600-24 mit Getriebe 6.7:1 (vgl. Kapitel 2.4) bieten sich 4S- (vier Zellen in Serie), 5S- oder – sehr brachial – 6S-LiPo-Akkus an. In Anlehnung an die offizielle Antriebsauslegung von Dr. Wolfgang Schäper habe ich mich für einen Enerland|EN LiPo-Akku PolyQuest 4500XQ 4S1P mit 30C (499g) entschieden, weil dieser relativ leicht ist, sehr gut in den Rumpf der Solution XL Projekt Zwo passt und die Stromstärke immer noch unter 60A liegt (der Akku würde eine Dauerstromstärke von 135A, kurzzeitig sogar 225A, vertragen). Ausserdem ist der Funkenschlag beim Anschliessen eines 4S-LiPo-Akkus aufgrund der niedrigeren Spannung natürlich weniger ausgeprägt, was die Hochstromstecker 6mm (Gold) schont.
Update [Januar 2010]: Eine selbst gebastelte Anti-Blitz-Schaltung in Form eines 4.7Ω-Drahtwiderstandes (3W) verhindert nun den Funkenschlag und schont dadurch die «Goldies» zusätzlich.

LiPo-Akkus werden vor allem wegen ihrer hohen Energiedichte geschätzt, haben jedoch auch einen grossen Nachteil: bei Überladung, Kurzschluss oder mechanischem Defekt können sie sich entzünden oder im schlimmsten Fall sogar explodieren; Beispiele findet man auf YouTube|EN zur Genüge. Deshalb dürfen die wertvollen Energiespeicher nur gemäss Herstellerangaben und mit dafür vorgesehenen Geräten geladen werden (ab zwei Zellen immer mit Balancer). Zudem muss der Ladevorgang bei starker Erwärmung sofort unterbrochen werden –, Aufsicht ist deshalb Pflicht!
Aus diesem Grund lade und «überwintere» ich LiPo-Akkus nur noch im LiPo-Safe (vgl. Abbildung; Quelle unbekannt), einem Sack aus schwer brennbarem Material mit Klettverschluss und seitlichen Lüftungsschlitzen, durch welche die Ladekabel geführt werden können. Den LiPo-Safe gibt es in zwei Grössen, wobei der grössere (22cm x 30cm) für LiPo-Akkus mit mehreren Zellen geeignet ist und rund CHF 40.— (ca. €UR 25.—) kostet.
Update [Juli 2009]: Die Entwicklung im Bereich der Akkus ist rasant; bereits jetzt ist mit dem Enerland LiPo-Akku PolyQuest V2 4550XQ 4S1P (492g) die nächste Generation erhältlich.
Bei meinem ersten Grosssegler – besser: fliegende Kapitalanlage! – wollte ich mich nicht auf die rein theoretische Antriebsauslegung (vgl. Kapitel 2.4) verlassen, sondern jederzeit die «verbratene» Kapazität auf einem Display kontrollieren können, um den LiPo-Akku nicht unter 30% zu entladen. Ausserdem wollte ich hinterher den Verlauf von Stromstärke und Temperatur mittels USB-Kabel auf dem Notebook kontrollieren können. Ein typischer Logger musste also her!
Nach längerem Hin und Her entschied ich mich für den Eagle Tree Systems|EN eLogger V3 (20g) in der 100A-Version mit integriertem 128KB Datenspeicher (vgl. Abbildung 6). Diese modulare Black-Box kann zum vollwertigen GPS-Logger ausgebaut werden. In meinem Fall reichen das ultra-dünne, konfigurierbare PowerPanel LCD Display (14g) und Sensoren für die Temperaturmessung an Motor (Loop Temperature Sensor), Regler und Akku (Micro Temperature Sensor).
Update [Januar 2010]: Mittlerweile habe ich festgestellt, dass der eLogger V3 nicht – wie in den technischen Daten angegeben – über 128kB, sondern über 512kB Speicherplatz verfügt. Der Haken: nur nach der Zahlung von weiteren US$ 9.99 (ca. CHF 10.— / €UR 7.—) lässt sich diese künstliche Limitierung mittels eines Codes über die Software freischalten!
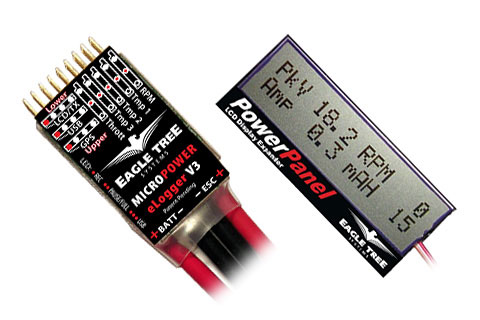
Abbildung 6: Eagle Tree Systems eLogger V3 (links) mit PowerPanel LCD Display (rechts).
Photos: Eagle Tree Systems
Als Alternative wäre der SM-Modellbau|DE UniLog (6g) mit integriertem Höhenmesser in Frage gekommen. Der komplizierte Stromsensor und die – für eine Technologie-Firma – (damals) selten aktualisierte Website schreckten mich jedoch so fest ab, dass ich letztendlich Eagle Tree Systems den Vorzug gab.
Update [Juli 2009]: Um den Fokus vermehrt auf das Thermiksegeln zu richten, habe ich mir ein Renschler|DE Variometer Picolario Talk (22g) gekauft. Auf den Einbau einer TEK-Düse werde ich verzichten, weil einerseits verschiedene Experten, wie Markus Lisken und Ulf Gerber im vth-Fachbuch «Das Thermikbuch für Modellflieger – Thermik finden und optimal nutzen» [September 1992], davon abraten, und andererseits ein Wechsel zwischen verschiedenen Modellen erschwert würde.
In puncto Zubehör ist alles geklärt; damit kann der Bau beginnen...
UNDER CONSTRUCTION weitere Informationen folgen...
weitere Informationen folgen...
Am 27. Januar 2008 begann der Bau...
Beim Bauplan im Massstab 1:2.5 wären ein paar Hinweise mehr sinnvoll, für Fortgeschrittene ist das aber sicherlich mehr als genug. Das Modell verfügt über die Funktionen Höhe, Seite, Querruder, Wölbklappe, Störklappe (über Y-Kabel), Motorregler und Butterfly. Das optionale Landerad wurde nicht angebracht, da die standardmässig einlaminierte Schleppkupplung durch einen Elektromotor ersetzt wurde. Alles in allem kostet der Segler in dieser Konfiguration mit Empfänger, Logger und komplett mit Digitalservos knapp unter €UR 2000.—.
Der Bausatz von Konstrukteur Bernd Schwermann ist sehr durchdacht, die Anleitung recht ausführlich, der Vorfertigungsgrad sehr hoch. Servoeinbaurahmen, sämtliches Befestigungsmaterial (bis auf Klettband und Kabelbinder) und Anlenkungszubehör sind enthalten. Beim Bauplan im Massstab 1:2.5 wären ein paar Hinweise mehr sinnvoll, für Fortgeschrittene ist das aber sicherlich mehr als genug. Das Modell verfügt über die Funktionen Höhe, Seite, Querruder, Wölbklappe, Störklappe (über Y-Kabel), Motorregler und Butterfly. Das optionale Landerad wurde nicht angebracht, da die standardmässig einlaminierte Schleppkupplung durch einen Elektromotor ersetzt wurde. Alles in allem kostet der Segler in dieser Konfiguration mit Empfänger, Logger und komplett mit Digitalservos knapp unter €UR 2000.—.
| linke Fläche | 1225g |
|---|---|
| rechte Fläche | 1224g |
| Rumpf und Kabinenhaube | 2786g |
| Leitwerk und Designhutze | 132g |
| Variometer | 22g |
Tabelle 5: Meine Solution XL Projekt Zwo kommt inkl. Variometer auf ein Totalgewicht von 5389g.
Baukasteninhalt: weißer GFK-Rumpf, CFK-verstärkt mit Seglernase, inkl. Flächen- und Leitwerksaufnahme, eingeharzter Schleppkupplung und Bowdenzugrohr. GFK-Seitenruderklappe mit Hohlkehle, GFK-Seitenleitwerkshutze, passgenaue, hochglänzende CFK-Kabinenhaube sowie einige nicht übliche Extras (siehe Abbildungen). Leichte und sehr feste mit Glasfasern verstärkte SIMPROP High-Tech Flächenhälften (Styro-Abachi) mit fast spaltfrei anscharnierten Ruderklappen, fertig eingebauten Störklappenkästen mit geschliffenem Ø 14mm Steckstahl sowie aller Ausfräsungen und Details (bespann- und installationsfertig). Profiliertes, schraubbares Höhenleitwerk in gleicher Ausführung. Exakt gestanzte Brettchen für RC- und Akkuaufnahme, GFK-Motorspant, Kunststoff-Servorahmen, olystal-Steuergestänge sowie sämtliche Klein- und Anlenkungsteile für alle Versionen. Farbiger, selbstklebender Dekorbogen und Plan mit bebilderter Anleitung.
weitere Informationen folgen...
Als Zubehör wäre ein fertig konfektionierter Kabelsatz von Simprop erhältlich.
Abbildung 7: Wurzelrippe mit Scherbolzen, Multiplex Hochstromstecker und Steckung.
In die Wurzelrippe muss ein Scherbolzen gegen Verdrehung eingeharzt werden. Das Gegenstück in der Fläche, ebenfalls eingeharzt. Die zweifarbige Bespannung (perlmutt-blau und weiss) der ARF-Version ist vorbildlich, die von mir selbst angebrachten Leitwerks- und Flächenverzierungen weniger). Pro Fläche kommen je drei Futaba Slim Digital Servo S3150 zum Einsatz (23g; Achtung: diese sollten gemäss Futaba nicht mit 6V betrieben werden). Die Querruder- und Wölbklappenservohebel – falls nötig – unbedingt mit einem 1.7mm-Bohrer, und nicht grösser, erweitern. Sie werden mit PowerStrips eingeklebt und zusätzlich mit Silikon gesichert. Es kommen verdrillte 0.3mm2-Litzen zum Zug, die selbst mit Futaba Steckern / Buchsen "becrimpt" sind (bei den dicken Kabeln etwas mühsam). Die Flächen wiegen 1224g, resp. 1226g. Sie werden mit kleinen Nimbusschrauben, die auf den Flächenstahl drücken, fixiert.
Die Störklappen werden über ein Y-Kabel im Rumpf verbunden, weshalb eines der Servos verkehrt herum eingebaut werden musste (deshalb ist eine Fläche 2g schwerer). Die Störklappenservos werden eingeschrumpft, angerauht und dann eingeharzt. Ein passgenauer Übergang bei eingefahrenen Störklappen erwies sich als ziemlich schwierig, zu beachten gilt, dass beide Störklappen im eingefahrenen Zustand sauber verriegeln. Sollten die Störklappen nicht ausreichen, kann der Segler zusätzlich über einen Butterfly gebremst werden (die Bremswirkung ist dann extrem und vor allem für im Gebirge geeignet). Der Störklappen-Anlenkhebel muss vor dem Montieren nachgebohrt werden.
weitere Informationen folgen...
Auf Entstörringe kann bei Verwendung von Digitalservos und 2.4GHz getrost verzichtet werden. Rumpf (2674g) und Kabinenhaube (112g).
Innenläufer sind teuer, aber bieten den besseren Wirkungsgrad. Die genialen Jive- und Jazz-Regler machten mich auf die Firma Kontronik aufmerksam, deshalb die folgende Wahl: Der Kontronik Innenläufer-Motor Kira 600-24 mit Getriebe 6.7:1 (312g) wird mittels 3.5mm-Goldsteckern mit dem edlen Kontronik Regler Jive 80+ LV verbunden (84g; fixiert durch ein selbst angefertigtes Sperrholzstück (vorne) und Klettband (hinten); Luft kann unter dem Regler zirkulieren); letzterer wird mit Hilfe einer ProgCard II auf eine BEC-Spannung von 5V limitiert. Zwei separate BEC-Kabel mit Ringkern versorgen die Bordelektronik mit maximal 15A (5A Dauerstrom). Auf einen separaten Empfängerakku und das damit verbundene Zusatzgewicht wird deshalb verzichtet; das BEC ist kurzschlussfest. Ein Eagle Tree eLogger V3 (20g; verträgt bis zu 100A; unter dem Servobrett) mit PowerPanel LCD Display (14g; vgl. Photo) misst neben Spannung und Stromstärke (und indirekt Kapazität und Leistung) auch die Betriebstemperaturen von Motor (Loop Temperature Sensor), Regler und Akku (Micro Temperature Sensor). Der voluminöse Rumpf bietet sehr viel Platz. Sämtliche Steckverbindungen werden mit Schrumpfschläuchen versehen.
Abbildung 8 / 9: Klappluftschraube aero-naut CAMcarbon 18.5 x 12" und der Übergang von der Kabinenhaube zum Rumpf (links); im Rumpf ist sehr viel Platz vorhanden (rechts).
Ein Simprop Alu-Spinner Turbo Ø 45 / BW 8mm / Ø 6.0 (20.5g; zur Kühlung) mit aero-naut Klappluftschraube CAMcarbon 18.5 x 12“ (32g) liefert einen Standschub von rund 42.7N, resp. 24.3m/s bei 4775U/min (31'990U/min mit Getriebe 6.7:1), dabei fliessen zu Beginn 58.1A (der seit dem Jahre 2009 erhältliche Kontronik Regler Jive 60+ LV würde also ausreichen). Die Eingangsleistung beträgt 807.2W, resp. 151W/kg. Da der Wirkungsgrad je nach Geschwindigkeit zwischen 84.8% und 89.5% liegt, ergibt sich eine Ausgangsleistung von 729.3W, resp. 136.4W/kg, womit eine Steigleistung von 6.24m/s erreicht werden kann (die nicht messbaren Daten wurden mit MotoCalc 8.07 errechnet). Als leicht gröbere Alternative wäre eine aero-naut Klappluftschraube CAMcarbon 18.5 x 12“ zu empfehlen. Die Kabinenhaube ist aus CFK, allerdings mit 112g etwas schwer geraten und von Haus aus nicht wirklich passgenau. Wegen des nicht empfohlenen Motors musste ein eigener, mit Kühllöchern versehener GFK-Motorspant aus einem 40mm-Rohling geschaffen werden. Das Rumpfüberstandsmass muss dabei so klein wie möglich gehalten werden. Der Motor wird mit vier Metallschrauben M3x8mm fixiert. Der Übergang zwischen Spinner und Rumpf ist nicht ideal gelungen, obwohl eine Anrisslinie zum Abtrennen der Nase eingezeichnet ist. Das nächste Mal würde ich die vorhandene, sehr feine Trennlinie mit einem Bleistift zur besseren Sichtbarkeit nachmalen.Ausserdem den Spant noch weiter vorne einlaminieren.
Abbildung 10: Saubere Verkabelung im Rumpf.
Ein moderner Futaba Empfänger R6014FS FASST 2.4GHz mit 400mm Empfängerantennen, die über ein Bowdenzugröhrchen nach draussen geführt werden, sorgt für sichere Verbindung. Entgegen dem Bauplan wurde der Empfänger nach hinten verschoben und mit einem Klettband auf einem gepolsterten, eingeharzten Sperrholzrechteck fixiert. Sämtliche Servokabel sind mit Funktion und Kanal beschriftet (z.B. Brother P-Touch-Beschriftungssystem) und zur besseren Ordnung mit (nicht zu fest angezogenem) Kabelbinder zusammengefasst. Zwei Futaba Standard High-Torque Digital Servo S3050 (49g) steuern das Seiten- und Höhenleitwerk. Eine Servopositionierung im Leitwerk ist zwar vorgesehen, erweist sich auf Grund der knappen Platzverhältnisse jedoch als praktisch unmöglich. Auch gibt die Bauanleitung keinerlei Hinweise.
UNDER CONSTRUCTION weitere Informationen folgen...

Eigentlich hatte ich mit den Deans Hochstromsteckern UltraPlug sehr gute Erfahrungen gemacht: sie sitzen absolut stramm, sind verpolsicher und als Paar nur 4.7g schwer. Als ich mich dann für die Simprop Solution XL Projekt Zwo entschied, war aber auch klar, dass ich mich von diesem Steckersystem aufgrund der knappen Dauerbelastbarkeit von 60A abwenden musste.
Die Anforderungen waren klar: mindestens 80A Dauerbelastbarkeit, möglichst stramm sitzend, möglichst kleiner Widerstand, für dickere Anschlusskabel (wie sie bei Akkus mit 30C vorkommen) geeignet und dabei nicht zu schwer. Relativ schnell war klar, dass der gemeinsame Nenner Hochstromstecker 6mm mit polierten, hart vergoldeten Feinschlitzsteckern ist. Diese Stecker sind im Vergleich zu anderen 5.5mm- bis 6mm-Steckern mit 4.1g eher leicht, verkraften aber im Gegensatz zu den meisten 4mm-Steckern mit von Gerd Giese errechneten 250A aber mindestens dreimal so viel Stromstärke. Unglaublich auch der Widerstand von unter 0.05mΩ!
Für mich ist dieses Stecksystem so überzeugend, dass ich es fortan in allen Modellen – ob klein oder gross – einsetzen werde. Es ist zwar leicht grösser, die Vereinfachung beim Akkuwechsel ist aber massiv. Zudem brauche ich nun nur noch zwei Ladekabel: eines für den Futaba Sender und eines für alle Akkus.
Als Akku dient ein Enerland 4S-LiPo PolyQuest 4500XQ 4S1P mit 30C resp. 14.8V und 4500mAh (499g), der über 6mm-Goldstecker angeschlossen wird und auf einer komfortablen Akku-Rutsche befestigt ist. Funkenschlag ist übrigens kein grosses Problem. Die Akku-Führungsleiste musste angepasst werden, weil der Akku zu breit war; es kamen 2mm x 2mm-Vierkantleisten anstatt der 3mm x 8mm Leisten zum Einsatz. Zusätzlich wird der Akku seitlich durch ein weiteres Klettband gestützt. Beim Bohren der Haubenverrigelung ist leider etwas GFK abgebröckelt (Produktionsfehler?). Auch die Toleranz der Sperrholzteilchen ist etwas gross; oft muss millimeterweise nachgeschliffen werden. Nicht vergessen werden darf, dass man den Rumpf vor dem Einharzen des Führungsspants gut anrauhen muss. Den Führungsspant könnte man gut und gerne 1cm weiter vorne einkleben. Letzterer besteht aus gestanzten Sperrholzteilen, die mit dem beiliegenden Ponal-Express-Holzleim zusammengeklebt wird.
Abbildung 11: Die Empfängerantennen werden aus dem Rumpf geführt.
Die Empfängerantennen werden hinter den Flächen in einem Winkel von rund 90° aus dem sehr festen, mit CFK verstärkten, vorbildähnlichen und aerodynamischen Rumpf (2154g) geführt.
Abbildung 12: Multiplex Hochstromstecker sind fest im Rumpf eingeharzt.
Geschliffener 14mm Steckstahl (passt nach entgraten der Rumpfdurchbrüche saugend), Kufe, geniale Schwerpunktmarkierung (wenn einmal keine Schwerpunktwaage zur Hand ist), Anti-Rutsch-Sicken und Flächen-Ausrichtungs-Arretierungsauflage. Sämtliche Kontakte werden über einen eingeharzten grünen Multiplex-Hochstromstecker (vor dem Einharzen Rumpf mit reichlich Nivea-Crème einfetten; am besten Wegwerfhandschuhe und Plastik-Rührstäbchen verwenden) in die Flächen geführt, wobei die je drei Plus- und Minuskabel über je einen Pin laufen (zusammengefasst). Neben den drei Impulsleitungen bleibt ein Pin frei. Damit die ganze Sache nicht auseinander fällt, wird um den Hochstromstecker ein Klebeband geklebt und dann mit Harz gefüllt. Damit sind sämtliche Kabel fest mit dem Stecker verbunden. 25cm Verlängerungskabel resp. ein Y-Kabel für die Störklappen mit Futaba-Steckern führen zum Empfänger (eher knapp, für diese Positionierung allerdings in Ordnung). Klar gäbe es von Simprop einen fertig konfektionierten Kabelsatz, doch sind die dabei vorhandenen Entstörringe beim Einsatz des FASST-Systems absolut überflüssig. Das alles braucht jedoch sehr viel Zeit.
weitere Informationen folgen...
Das GFK-Seitenruder mit Hohlkehle wird aerodynamisch günstig und spielfrei über einen Seilzug angelenkt, mit Sekundenkleber fixiert und ist bei Landungen durch den Steg wunderbar geschützt. Der Rumpfabschluss muss recht stark nachgearbeitet werden, ist dann aber spaltfrei.
Probleme zeigen sich auch bei der Dehnbarkeit resp. der Führung des Seitenruder-Seilzuges im Rumpf, der gekürzt und neu eingelötet werden muss (wahrscheinlich vom Transport).
Martin Eichstedt: Mir ist bei der Montage des Seilzuge folgender Fehler unterlaufen, der auch bei Dir zu den geschilderten Problemen geführt haben könnte: die Seile habe ich versehentlich nicht durch die Löcher in der Seitenruderverstärkung geführt, sondern unter diesem Holzbrettchen hindurch. Kommt nun starker Zug auf das Seil, "schneidet" es sich in das Holz und wird dadurch locker. Ob das Seil richtig liegt lässt sich ja zum Glück ganz leicht durch Seitenruderdemontage feststellen.
Abbildung 13: Das Seitenruder wird aerodynamisch optimal angelenkt.
Das GFK-Seitenruder mit Hohlkehle wird aerodynamisch günstig und spielfrei über einen Seilzug angelenkt, mit Sekundenkleber fixiert und ist bei Landungen durch den Steg wunderbar geschützt. Der Rumpfabschluss muss recht stark nachgearbeitet werden, ist dann aber spaltfrei.
Ungewöhnliche, aber spielarme Anlenkung über einen Polystahl (im Bowdenzugrohr) des hochfesten, genialen und futuristischen T-Leitwerks (121g), welches sich komplett unter der neuartigen Designhutze versteckt (11g; Magnet-Verschluss). Dadurch wird ein grosser Hebelarm ermöglicht. Das Höhenleitwerk wird mit einem 4er Nimbusschlüssel aufgeschraubt und ist ebenfalls aus Styro-Abachi. Der Zentrierdübel aus Buchenholz muss ziemlich stark geschliffen werden, damit er passt. Sehr mühsam und zeitintensiv zu bewerkstelligen sind die notwendigen Öffnungen in der Flosse, sie gelingen mit einer Kombination aus Bohren und Schleifen aber sehr genau.
Die Rumpfabschlussleiste ist sehr schlecht eingeharzt und hat sich bei meinem ersten Crash gelöst. Zuvor hatte sich die Bowdenzughülle der Höhenruderanlenkung aus der Rumpfabschlussleiste gelöst; sehr gefährllich, denn dadurch verstellt sich das Höhenruder! Auch hier besser mit etwas Epoxy nachkleben. Ausserdem gilt es zu beachten, dass das linke Seil des Seitenruder-Seilzugs links von der Höhenruderanlenkung geführt wird, sonst scheuert sie aneinander (alles in Flugrichtung gesehen).
Die Finne hat sich bei keinem einzigen Testflug gelöst; auch nicht bei den Crashs.
weitere Informationen folgen...
Auf den Dekorsatz wurde weitestgehend verzichtet, da dieser so "verspielt" wirkt, dass einem übel wird. Da das Schweizerkreuz nicht zu den bläulich-violetten Flächenunterseiten passt, wurde lediglich auf dem Rumpf eine "SUI-18" aufgebracht. Futaba Sender T10CP & R6014FS FASST 2.4GHz
Eine sehr gute Seite zur Graupner mc-24 ist Segelmodelle mit E-Antrieb|DE von Arno Wetzel.
Im "Standby" werden 75mAh verbraucht, dieser Wert steigert sich auf ca. 120mAh, wenn kräftig mit den Servos "herumgeturnt" wird. Mit vollem Standschub werden 810mAh verbraten. Wenn man von der für LiPos geltenden 70%-Regel ausgeht, 1h Service (Standby) und vier Flugstunden einrechnet, verbleibt mit dem 4500er Akku somit eine Antriebszeit von 3min 12s, ich habe deshalb auf meinem Futaba Sender T10CP FASST 2.4GHz einen Alarm bei 3min programmiert. Insgesamt sollte eine totale Steighöhe von 1200m erreicht werden können.
FailSafe.
| Kapazität | |
|---|---|
| Empfänger, Regler, Datenlogger | 75mAh |
| Servos | 45mAh |
| Standschub | 48'525mAh |
Tabelle 6: Errechnung der verbrauchten Kapazität.
Die Computerfernsteuerung wird im Mode 2 benutzt, rechts befinden sich die Quer- und das Höhenruder, links das Seitenruder und der Butterfly. Der Motor lässt sich über einen Zweiwegschalter ein- und ausschalten, wobei in ersterem Zustand über einen Dreiwegschalter entweder Vollgas oder die Bedienung über zwei individuelle Drehschalter gewählt werden kann. Die Wölbklappen werden über die Flugphasen "Speed" und "Distance" angesteuert, wobei sich in "Distance" die Wölbklappen über einen Drehregler justieren lassen. In der Flugphase "Landing" werden die Störklappen ausgefahren. Der Quer-Wölbklappen-Mix und der Quer-Seiten-Mix können ebenfalls über Schalter zugeschaltet werden, während die Querruderdifferenzierung immer aktiv ist. Ein Failsafe stellt im Notfall den Motor aus und aktiviert die Bremssysteme.
weitere Informationen folgen...
Robbe führt den selben Sender unter der Bezeichnung FF10 in seinem Sortiment.
Etwas versteckt im Seglerprogramm kann man unter "Condition" die "BRKL-FUNC" einem Schalter zuordnen, in meinem Fall dem dreistufigen "SwE".
Ich habe dann zwei Mischer genommen, die mir dem Kanal 3 jeweils -100% beimischen ("OFFSET"), sofern "SwF" auf Position "UP" ist. Zudem habe ich einen Mischer, der mir dem Kanal 3 den Schalter A zumischt, sofern "SwE" in Mittelposition ist.
Das erzeugt dann folgende Funktion:
"SwF" hinten -> Motor immer aus.
"SwF" vorne: "SwE" vorne -> Motor aus, "SwE" Mitte -> Drehzahlsteuerung über "VR(A)", "SwE" hinten -> immer Vollgas.
Vorteile: 1) Sicherheit, weil zwei Schalter betätigt werden müssen, bis der Motor beim Start anspringt. 2) Mittelstellung zum Test in der Startvorbereitung. 3) Im Flug kann mit einem Schalter von Vollgas auf Aus gestellt werden, mehr braucht man dann nicht. 4) Butterfly von Gas getrennt; verhindert Fehlmanipulationen in hektischen Momenten. 5) Störklappen weiterhin auf Kanal 8 über V-Kabel nutzbar.
Und nun ab in die Luft...
weitere Informationen folgen...
Am 7. April 2009 erfolgte der Jungfernflug auf dem Areal des «Polo Park Zürich» zwischen Ohringen (bei Winterthur) und Hettlingen; hier gibt es eine 400m lange und 150m breite, perfekt präparierte «Landepiste» auf Rasen. Nach erfolgreichem Reichweiten-Test (auch bei laufendem Motor!) und einem letzten sorgfältigen Check aller Teile wurde die Solution XL Projekt Zwo zum ersten Mal «in den Himmel geworfen». Mein Puls und Blutdruck waren alles andere als vorteilhaft; vielleicht sollte man doch besser einem Verein beitreten und sich dort von einem «alten Hasen» im Lehrer-Schüler-Betrieb mittels Trainerkabel einweisen lassen!
weitere Informationen folgen...
Schnell zeigt sich, dass die Einstellvorgaben korrekt waren, es muss nur leicht getrimmt werden. Simprop hat sicherlich ausgedehnte Testflüge unternommen. Erstaunt war ich vor allem, wie still und gutmütig die Solution XL Projekt Zwo in der Luft liegt, das ist kein Vergleich zu einer Schaumwaffel! Durch den ausgeprägten Durchzug sind wunderschöne Loopings möglich und auch die Wölbklappen halten ihr Versprechen: der Einsatzbereich lässt sich noch deutlich in Richtung «soft» oder «hot» verschieben.


Abbildung 14 / 15: Der 4m-Segler mit seinen über 5kg Gewicht vor und während des Starts.
Photos: Christian Muff (links); Sabine Muff (rechts)
Nachdem ich die Störklappen und den Butterfly in etwas Höhe getestet habe, versuche ich die erste Landung. Und siehe da, der Allrounder segelt handzahm zur Landung herein und setzt sauber auf. Für den Rest des Tages grinste ich mindestens so stark, wie man es von Tom Cruise gewohnt ist!
weitere Informationen folgen...
Die Auswertung der Telemetrie-Daten hat ergeben, dass die Antriebsauslegung passt. Auch wenn beim Erstflug eher konservativ geflogen wurde, stieg die Stromstärke auf höchstens 53.4A (66.75%). Nach 3min Motorlaufzeit und ca. 25min Flugzeit war die halbe Kapazität des Akkus aufgebraucht. Dabei war die Stromversorgung rund 45min eingeschaltet. Es mussten ca. 2200mAh nachgeladen werden. Damit lässt sich sagen, dass genügend Reserven für ausgedehnte Thermikflüge oder Landeabbrüche vorhanden sind.
Abbildung 16 / 17: Die Stromstärke während des Erstflugs betrug maximal 53.4A (links); die maximale Leistung Pin betrug 741.9W, die Temperatur des Akkus 39.2°C (rechts).
Die Kühlung des Reglers ist optimal durch den Wind bewerkstelligt, und auch der Motor kann sich durch den Turbo-Spinner genügend abkühlen. Die Temperatur des LiPo-Akkus steigt hingegen auf fast 40°C an, was für die chemischen Prozesse im Innern aber förderlich ist (es soll sogar Leute geben, die ihre Akkus auf diese Temperatur vorheizen).
Update [Oktober 2009]: Bis heute stieg die Stromstärke nie über 56.3A, die maximale Leistung Pin betrug 809.3W. Der Motor lief nie länger als 5s über der Dauerbelastungsgrenze, was gemäss Kontronik «problemlos» ist. Auch die Temperatur des LiPo-Akkus geriet im ersten Jahr nie über 45.5°C.
Update [Oktober 2009]: Nach mehreren Tests am Boden und in der Luft habe ich die reine Antriebszeit auf 3min 30s festgesetzt, damit sollte das BEC immer noch gut 4h reinen Segelflug zulassen. Wichtig ist, die LiPo-Akkus nicht unter 30% der Kapazität zu entladen!
In meinem Logbuch (vgl. Tabelle 5) protokolliere ich die Anzahl absolvierter Flüge (Starts), allfälige Abstürze klassifiziert nach menschlichem – also meinem eigenen – Versagen (CFIT) oder technischem Defekt (UFIT), sowie die verbrauchte, resp. nachgeladene Kapaität; die Erläuterungen sind nach Jahren sortiert.
| Flüge | CFIT | UFIT | Kapazität | |||
|---|---|---|---|---|---|---|
| 2009 | 13 | 1 | 8% | 1 | 8% | n.a. |
| 2010 | 6 | 0 | 0% | 0 | 0% | n.a. |
| 2011 | 2 | 0 | 0% | 0 | 0% | 1.5Ah |
| Summe | 21 | 1 | 5% | 1 | 5% | 1.5Ah |
Tabelle 5: Logbuch (automatisch generierter Inhalt).
2009: Geglückter «Maiden Flight» mit einwandfreien Flugeigenschaften. | CFIT: Wegen eines Abspracheproblems zwischen Pilot und Werfer schläg der Flieger während des Startvorgangs in den Boden ein; Kabel zwischen Motor und Regler aufgewickelt und Cockpit voller Erde! | UFIT: Schon wieder ein Crash beim Werfen! Wahrscheinlich habe ich bei der Reparatur etwas übersehen oder der Start durch Werfen erfolgte in einem falschen Winkel; Motorspant ausgerissen; komplette Wartung. Bei der Überprüfung der Lötstellen entdecke ich, dass ein Hochstromstecker nicht mehr richtig hält! Probleme zeigen sich auch bei der Dehnbarkeit resp. der Führung des Seitenruder-Seilzuges im Rumpf, der gekürzt und neu eingelötet werden muss. | Erster Handstart ohne Werfer mit noch mehr Adrenalin, aber ohne Probleme; Antriebsauslegung hat sich bewährt. | Bei einem sanften Riegelpiez entsteht im hinteren Bereich der Verklebung der beiden Rumpfhälften ein ungefähr 10cm langer Riss; vorerst repariere ich die Stelle nur oberflächlich. | Nach kurzer erster Saison verpacke ich die Solution XL Projekt Zwo für den anstehenden Umzug. | Reparatur- und Wartungskosten: rund CHF 50.— (ca. €UR 50.—).
2010: Winter... die Wartungsarbeiten bringen keine unbekannten Mängel zum Vorschein. Wie geplant werden die Servo-Hebelarme von Querrudern und Wölbklappen ersetzt (um das Spiel wegen ursprünglich zu gross gebohrten Löchern zu reduzieren), die Einstellwinkeldifferenz (EWD) durch ein «Silikon-Kissen» am Leitwerk um rund 0.7° auf +1.78° erhöht und gleichzeitig der Schwerpunkt neu ausgewogen, sowie eine selbst gebastelte Anti-Blitz-Schaltung eingebaut. | Ein selbst entworfener Folien-Dekorsatz, der unter anderem die japanischen Kanji-Zeichen für «Solution» zeigt, wird angebracht. | Antennen werden mit aerodynamischen Verkleidungen aus flexiblem Silikon gegen Abknicken geschützt. | Nach einem Riegelpiez zeigt das Seitenleitwerk leicht nach rechts und muss neu justiert werden; im gleichen Zug wird der Kontronik Regler Jive 80+ LV für ein kostenloses Software-Update auf die Version 9 zu Kontronik eingesendet (nach einer Sicherheitsabschaltung in Folge Überlastung oder Fehlbedienung hätte es vorkommen können, dass das BEC «länger als gewünscht» gebraucht hätte, um wieder volle Leistung zu bringen). | Bowdenzugröhrchen im Leitwerk erneut beim Transport ausgerissen, muss geharzt werden. | Reparatur- und Wartungskosten: minimal.
2010: 74g eingespart durch Wechsel auf neune Logger und Wegfall des Vario; neuen Rumpfausbausatz bestellt, um mit modifizierter Akkurutsche Schwerpunkt wieder erreichen zu können.
UNDER CONSTRUCTION weitere Informationen folgen...
Dank (in alphabetischer Reihenfolge): Daniel Biehle, Martin Eichstedt, Udo Fiebig, Michael «Mike» Franz (Kontronik|DE), Walter Frehner (Frehner Folientechnik|DE), Gerd Giese (Elektromodellflug|DE), Christian Muff, Sabine Muff, Eckart Müller, Werner Nef, Patrick Ridolfi (PR-Modellbau|DE), Thomas «Thommy» Seidel (Thommys.com|DE); Polo Park Zürich.